引言
随着高性能永磁材料技术、电力电子技术的飞速发展以及自动控制理论、矢量控制理论研究的不断深入,上海合愉电机永磁同步电机控制系统得到迅速发展。永磁同步电机具有结构简单、运行可靠、效率高、功率因数高等优点,因而被广泛应用于国防、农业、日常生活中。与感应电机相比,控制相对简单、不存在励磁损耗,因此在高精度、高性能的驱动系统中有有很开阔的发展空间。
现阶段永磁同步电动机多采用矢量控制,包括速度和电流的双闭环系统。这样的系统具有结构简单、稳定性好、稳态精度高等优点,不过存在响应不够快速和抗负载扰动能力弱等缺陷。本文为解决传统控制器的鲁棒性能差、系统抗扰动能力弱等问题,针对永磁同步电机矢量控制系统,设计出一种滑模速度控制器,并在 Matlab/Simulink 平台搭建仿真模型。仿真结果表明,该控制策略削弱了系统的超调量,使系统具有较好的动态性能。
永磁同步电机数学模型及矢量控制策略
1.1 旋转坐标系下的 PMSM 数学模型建立 PMSM 数学模型前,需做如下几点假设:
(1)忽略铁心饱和,不计磁滞损耗与涡流损耗;
(2)转子没有阻尼绕组;
(3)感应电动势为正弦波;
(4)永磁材料电导率为零,永磁体内部磁导率接近空气。
2PMSM 矢量控制
上海合愉电机有限公司对 PMSM 控制系统的基本要求可归纳为转矩控制的响应快、精度高、波动小;电机的效率高、功率因数高;系统的控制简单、可靠性高等。而所谓矢量控制技术,就是借鉴直流电机电枢电流和励磁电流相互垂直、没有耦合以及可以独立控制的思路,通过电机对定子电流在同步旋转坐标系中大小和方向的控制,达到对直轴和交轴分量解耦目的,从而实现磁场和转矩的解耦控制,使交流电机具有类似直流电机的控制性能。
(1)励磁电流 id=0 控制:对于在旋转坐标系下建立的永磁同步电机数学模型,使 d 轴电流 id=0,这是最简单常用的电流矢量控制方法。从电机端口看,相当于一台他励直流电机,定子电流中只有 q 轴分量,永磁体磁链空间矢量与定子磁链空间矢量相互正交,此时电机的电磁转矩与 q 轴电流成线性关系,转矩中只存在永磁转矩分量。对控制系统来说,只需检测出转子位置信号,使三相定子电流的合成矢量位于 q 轴即可。
(2)cosф=1 控制:为使逆变器的容量得到更充分利用,使电压矢量和电流矢量在同一方向上,则电机的功率因数恒等于 1。然而当负载变化时,永磁同步电机转子励磁不能调节,转矩绕组的总磁链不恒定,电枢电流和转矩之间不再保持线性关系。
(3)最大转矩电流比控制:在转矩给定情况下,使定子电流最小,这种控制电流矢量的方法就叫做最大转矩电流比控制。在这种控制方法下,随着输出转矩增大,电机端电压增大,功率因数会减小。
(4)弱磁控制:仿照他励直流电动机的调磁调速控制,通过对永磁同步电动机定子电流的调节,即增加负向 d 轴电流分量来维持电压的平衡,以达到弱磁增速的目的。
基于滑模控制的 PMSM 矢量控制
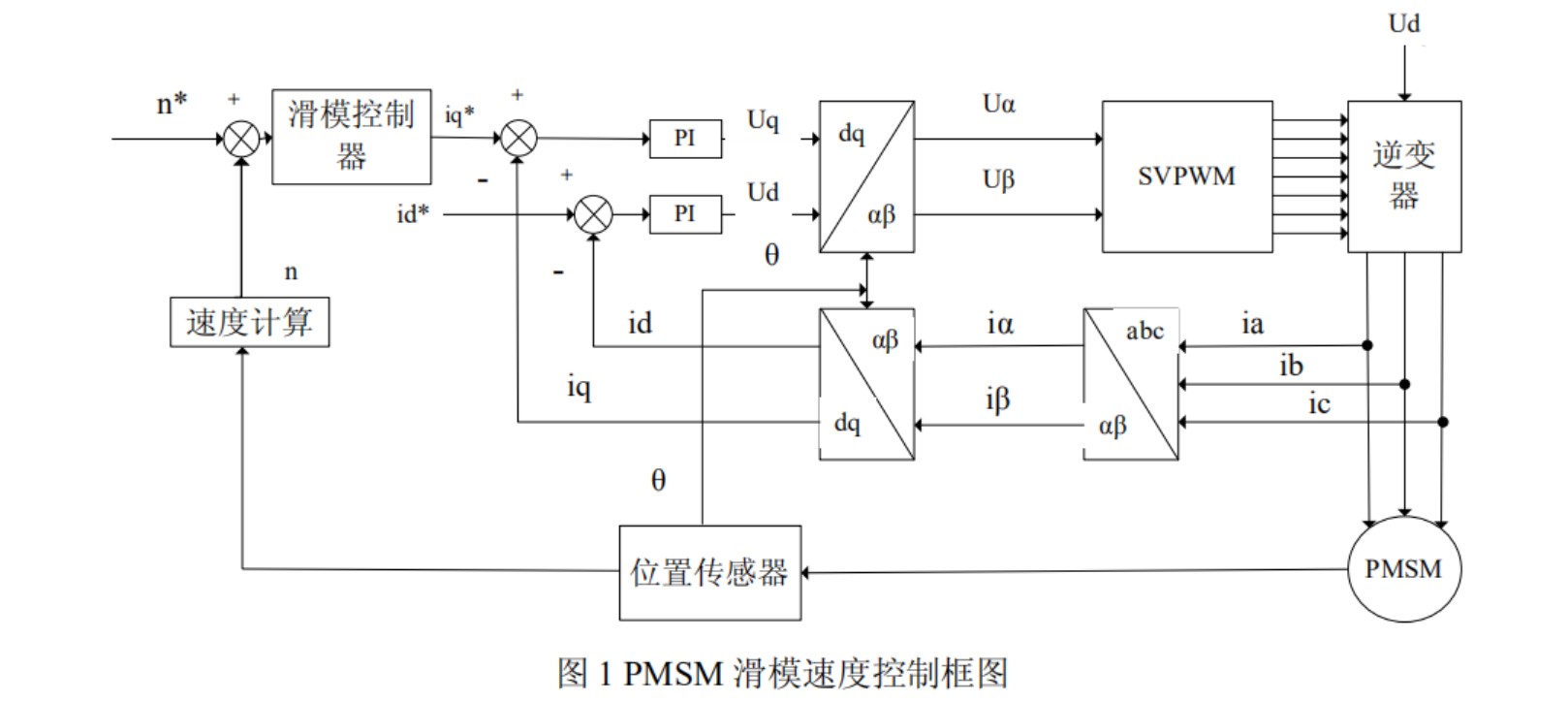
3.1 PMSM 滑模速度控制器控制框图
在传统的 PI 调节器中,其具有运算方便、可靠性高等优点,常被应用于 PMSM 调速控制系统。然而,PMSM 是一个非线性、强耦合的多变量系统,当控制系统受到外界扰动时,传统的 PI 控制方法并不能满足实际的要求。
因此,用滑模速度控制器代替传统的 PI 调节器,利用滑模控制对扰动参数不敏感、响应速度快的优点,来改善 PMSM 调速系统的动态品质。 PMSM 滑模速度控制器控制框图,包括定子电流检测系统、转子与位置速度检测系统、Clark 变换、Park 变换与反Park 变换、SVPWM 调制等几个环节,这些环节从内而外,构成了电流环、速度环和位置环。在图中,逆变器输出的三相定子电流 ia、ib、ic 通过 Clark 变换和 Park 转换成两相旋转坐标下的直流分量 id、iq,与滑模控制器输出的定子电流作反馈。电机的转速、位置信号经过传感器与给定的位置、转速信号经过 PI 调节后,得到 Ud、Uq,再经过反 Park 变换得到 Uα、Uβ作为 SVPWM 模块的输入控制信号,从而控制逆变器开关管的导通与截至,产生三相电控制电机运行,这就是矢量控制的基本思想。
3.2 仿真建模与结果分析
上海合愉电机根据以上的仿真结果能看出,在电机的转速从零上升到给定转速 800r/min 期间,在最开始一段时间里出现一些超调现象,但之后具有较快的动态响应速度,当 t=0.3s 时突然加一TL=5 N·m 的负载转矩,电机转速也能很快恢复到给定转速,因此说明该滑模速度控制器具有较好的抗扰动能力和动态品质。
总结
本文主要针对永磁同步电机矢量控制系统,通过建立永磁同步电机的数学模型,结合滑模控制基本原理,设计了一种滑模速度控制器,进而在 Matlab/Simulink 环境下进行仿真研究。由仿真结果显示,该控制算法具有良好的自适应能力,系统虽有一些超调量,但系统响应速度快,并且在电机突加负载转矩时对系统扰动较小。证明此控制器抗干扰能力较强,达到了预期的目的,为实际永磁同步电机速度控制性能的研究奠定了基础。