引 言
与传统异步电机闭环矢量控制方法相比合愉异步电机,无速度传感器控制系统降低了硬件复杂度和编码器的维护成本。提高了系统的抗干扰能力及其稳定性,已经在无法安装编码器的应用场合下,获得越来越多的应用。无速度传感器矢量控制的核心是转速的估计算法,目前有速度估算方法主要有: 磁链观测器 、卡尔曼滤波器 、自适应转速估计 、滑模观测器 等。在无速度反馈的应用场合下,特别是大功率的风机、水泵、动力机车等,由于其转子连接设备的转动惯量很大,从旋转状态到静止通常需要较长的时间,自由停车时间可能从几分钟到几十分钟。如果出现变频器掉电,电机处于较高转速旋转时立即重新上电直接启动,由于无法判断电机的运行状态,特别是运行转速,往往会造成电机过流,这对变频器、电机及其驱动设备都会造成损害。如果等电机完全停稳后再通过变频器从零开始加速运行则存在时间浪费,效率低下的问题。为了防止变频器带速启动时存在的异常,要求电机调速系统具备转速跟踪再启动功能。文献针对永磁同步电机提出了两次短路方法,通过采样电机在短路时间内的相电流来获得电机转速信息,但是这种方法无法对短路电流幅值进行有效控制,很容易出现过流等故障。
实现电机转速跟踪的关键在于对电机转速的搜索,但现存的“按转矩电流分量最小化”和“定子输入恒定电流比较”等搜索方法存在算法复杂、控制精度较低的问题。对于转速辨识,大多专利通过软件算法来实现,专利通过频率扫描的方法,专利通过建立模糊神经网络的方法,专利通过扩展卡尔曼滤波器的方法,以上方法均能实现转速的跟踪控制,但较为复杂,不利于数字控制器实现。且上述方法大多根据转矩电流为零或者根据电机输入功率过零来判断,在整个跟踪过程中受控制算法的动态特性影响,会使电机不断处于发电、电动的状态切换中,存在明显的转矩波动和电流冲击。要完成电机转速跟踪控制,变频器启动时不仅需要知道电机的当前转速,而且也要获得电角度,两者明确后才能完成平滑无冲击的转速跟踪再启动。本文提出了一种采用自适应 PI 控制的转速跟踪方法,通过简单的 PI 控制可以同时获得电机的运行转速和相位信号,并且通过电流幅值控制使整个跟踪过程转矩平稳,无电流冲击。整个辨识过程能在 2~3 个电周期内完成,响应快,转矩控制平滑。在获得电机转速和电角度信号后,本文设定了一个转速开环、电流闭环的过渡过程,并且由电流电压模型自适应控制使磁链观测和速度估计环节的内部参数达到稳定状态后切入双闭环运行。本方法控制简单,易于实现,不需要增加额外成本,可适用于三相异步电机在无速度控制下带速再启动时的速度跟踪控制。
1 基于磁链观测器的无速度控制
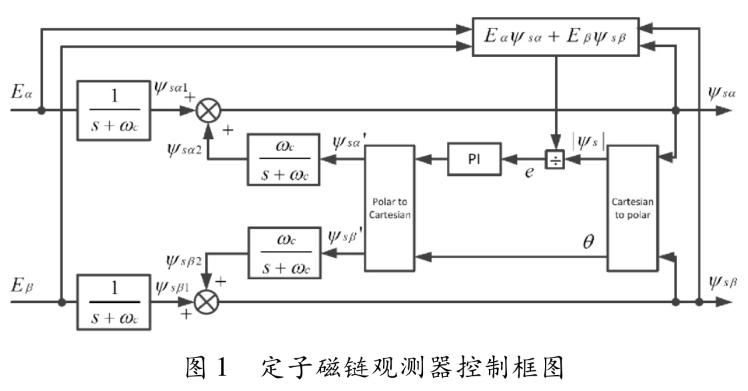
采用定子磁链观测器的控制框图,该方法不同于传统的低通 + 高通电压模型,虽然也用到低通截止频率 ω c ,但它的幅值和相位补偿是通过定子反电势与定子磁链 ψ 矢量正交的原理,将误差值经 PI 调节后输出的补偿量来实现的。在理想情况下,定子磁链与定子反电动势矢量在空间上垂直:
E α ψsα+ E β ψsβ=0
式中,E α 、E β 分别为定子反电势在 αβ 坐标下的分量,ψsα 、ψ sβ分别为定子磁链在 αβ 坐标下的分量。但是当反电动势存在直流偏置,或者磁链矢量存在由积分相位引起的漂移时,磁链矢量 ψ 与反电动势不再垂直,式( 1) 不等于零,会产生偏差 e。该偏差 e 经 PI 调节后产生一个补偿磁链矢量,通过闭环反馈作用后,最终能实现反电势和磁链矢量正交。
2 转速跟踪控制技术
2. 1 电流幅值控制策略
当电机还处于旋转状态时,异步电机由于具有剩磁会存在一定的反电动势 。采用三相全桥电路作为主电路拓扑的变频器,此时将三路下桥全部导通,由于电机反电动势的存在会使电机处于短路制动状态,并产生三相电流,电机的机械能也将转化为电阻热能消耗。这种方法会产生较大的电流冲击,严重时造成变频器发生过流的故障。另外与永磁同步电机不同,异步电机自身的剩余反电动势较低,直接下桥短路的方式会造成这部分能量快速消耗,从而无法通过反电势产生的相电流信息来获得电机转速。
2. 2 基于锁相环的转速跟踪策略
通过电流传感器可以获得电机的三相电流,该三相电流中包含了电机的转速和相位信息,其电流频率即为当前转速对应的频率,电流相位即为电机电角度。采样 a、b 两相电流,经 Clarke 变换为 2 相 αβ坐标值,通过下式获得电机电角度。在整个转速跟踪环节中,电机的磁链观测器和速度估计环均处于关闭状态,其内部控制参数处于初始值,为使系统无冲击的投入速度电流双闭环的控制模式,需要将上述估计算法内部参数达到稳定状态。这里设计一种过渡算法将电机给定频率稳定在跟踪频率上进行速度开环、电流闭环运行。
3 电流电压模型自适应控制
在电机完成转速跟踪后,由于磁链观测器和转速估计环未参与实际运算,立即切入速度闭环控制,会造成整个系统的动态过程,由此引起电机转速振荡、力矩波动,严重时会造成电机失控等现象。
为克服直接切换时存在的问题,本文设计了转速估计后的过渡环节,通过该环节使磁链环参数达到稳定。在过渡过程中,我们给定输出频率为上一步骤中转速跟踪获得的电机实际转速频率,采用速度开环的控制方式,并且电机转矩电流控制为零,仅输出励磁电流分量。系统所用电角度 θ s 是由同步频率 ω s 积分获得,磁链观测器本质上是基于电压模型而建立的,其不含转速信号,因此可以作为参考模型。而电流模型中由于存在转速变量,因此作为可调模型。两种方式获得的转子磁链经矢量叉乘后并将误差经自适应 PI 调节输出,用于电流模型中的转速调节。经过若干电周期后,自适应 PI 控制器输出的转速频率与前文转速跟踪获得的真实转速频率基本一致,也即电流模型和电压模型获得的转子磁链完全重合时,可以认为电机控制系统内部参数已经达到稳定状态,此时切入速度闭环,系统进入正常运行模式。
4 实 验
实验在15kW 扶梯用三相异步电机上进行。选用 STM32F103RC 作为主控芯片,直流母线电压、相电流均通过采样电阻并经光耦隔离后获得。电机空载运行,当运行到 50 Hz 额定频率后,快速停机并再次启动。
4. 1 传统自适应转速跟踪实验
采用传统自适应转速跟踪控制时,未成功跟踪出电机转速频率的相电流波形图。从图中可以看出,由于采用下桥全开的控制策略,第一个电周期的电流峰值很大,并且由于剩余反电势较低,小电流情况下无法在 2 ~3 个电周期内完成自适应跟踪,电机还是从零速开始起动。
4. 2 电流限幅跟踪实验
电流限幅在 0. 4 和 0. 5 倍额定电流情况下的跟踪波形。从图中可以看出,经过PI 限幅调节,使得启动跟踪瞬间电机相电流峰值获得了有效的控制,而且电流波形稳定利于自适应转速跟踪,在跟踪完成后即切入电流电压模型自适应系统。
5 结 语
本文提出的基于上海合愉异步电机转速跟踪控制策略,包括相电流幅值控制、转速自适应控制、电流电压模型自适应控制三部分。通过电流 PI 调节可以对相电流幅值进行合理有效的控制,避免传统方式中下桥短路造成相电流过大而引起变频器过流的故障。另外通过电流幅值控制使得在整个转速跟踪环节中保证相电流稳定,在低剩余反电势场合下也能有效的辨识出电机转速。最后通过电流电压模型自适应为无速度控制算法提供一个过渡过程,在这一过程中使磁链观测器和转速估计环内部参数达到稳定,从而在切入转速、电流双闭环后保证系统能稳定运行。因此本文提出的转速自适应控制策略在应用上简单实用,转速跟踪性能良好,可用于异步电机的无速度控制系统中需要转速跟踪的应用场合。