引 言
异步电机矢量控制系统需要定子和转子的电阻、漏感、互感等参数,这些参数对电机负载能量和转速精度具有很大影响 。在电机的铭牌中,只有额定电压、电流、功率和转速等信息,为此需要根据这些参数来估算电机的电阻和电感参数。然而,由于电机实际的数据与铭牌数据有较大差别,导致估计得到的参数只能作为参考值 。为了进一步提高控制系统的有效性,需要对电阻和电感参数进行精确估计。
目前,对电机电阻和电感参数的估计方法主要有转子静止测量法、单相线圈激励法等结构简单的方法,或在线自适应控制等较为复杂的算法来实现电机参数估计。其中,转子静止测量法应用较为广泛,典型应用的有可变频率响应测取参数方法。这种方法适用于现场调试,也是设计变频器自调试功能的基础。频率响应法就是通过对一定状态下的电机施加不同频率的激励信号,量测它对这些信号的响应,从而得到系统传递函数,即电机的频率特性,并从这些频率特性中拟合出电机的参数。
对于鼠笼式异步感应电机的电机参数估计,学者提出了一些基于可变频率响应的估计方法。例如文献通过空载和短路实验测取参数,利用变频器测取参数,在运行中修正参数。但其只对单笼模型进行了分析,没有对双笼模型进行探讨。因此,本文采用一种可变频率响应法,即静止频率响应Standstill Frequency Response, SSFR)试验对电机的单笼和双笼模型参数进行了估计,并通过与实际测量值进行比较,证明了提出方法的有效性。
1 感应电机模型
单笼电机和双笼电机模型的静态等效电路图。
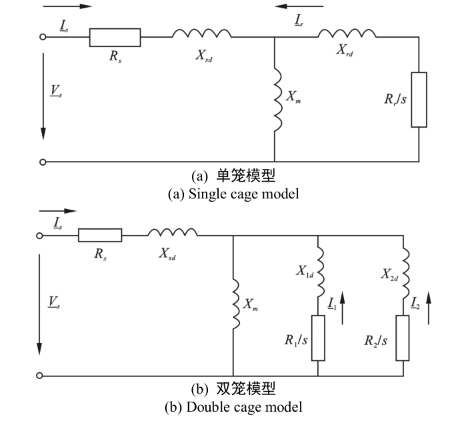
单笼模型的等效电路,具有5个参数,分别为:定子电阻 R s 、漏感 X sd 、互感 X m 和转子电子 R r 、漏感 X rd 。其中 X sd =X rd 。图 1(b)为双笼模型的等效电路,具有 7 个参数,分别为:R s 、X sd 、X m 、R 1 、X 1d 、R 2 、X 2d 其中 X sd =X 2d 。此外,X 1d 和R 1 为内笼转子绕组参数,用于模拟电机的正常工作特性,它在额定速度附近有很大的影响 [8] ;X 2d 和R 2 为外笼转子绕组参数,用于模拟电机的启动特性,它在零速度附近有很大的影响。所以,双笼模型能够比较精确地模拟电机的启动特性,但是其模型较为复杂,模型参数的确定比较困难。
2 改进算法描述
在电机控制中,控制器的性能取决于所使用的控制算法的电机参数准确性。为此,电机参数的准确估计尤为重要。本文利用 SSFR 试验对鼠笼式异步电机的参数进行估计。SSFR 试验中,当转子速度为零时(静止),通过利用可变振幅和可变频率的正弦电压源,向转子施加一个只有两相电压的变频电源信号,产生静止频率响应,并以此来估计电机参数 。
3 基于 SSFR 试验的参数估计
电机滑差为电机定子转速与转子转速之差。
经过多次试验,在本文电机参数估计应用中,设定 ε 取 0.001 较为合适。由于集肤效应,单笼模型无法将电阻行为解释为频率的函数。为此,估计单笼模型参数只需要使用低频率激励下的响应数据。对于双笼模型,在估计过程中使用高频率激励下的数据,可提高根据估计参数获得的预测数据与实际数据的匹配性。
4 验证与分析
实验中,本文采用了2台不同参数的ABB感应电机,其中,P N 为额定功率、U N 为额定电压、f N为电源频率、Nω 为额定转速、PF N 为电机效率、ST NI I 为启动电流倍数、ST NT T 为启动转矩倍数、max NT T 为最大转矩倍数。测试装置还包括变频速度控制器、电流传感器和安装在电机主轴上的转矩传感器。
为了验证本文方法对鼠笼式感应电机参数估计的有效性,首先在额定电流下,进行相间 SSFR试验,以此估计出电机参数。然后,在额定频率和不同滑差下,对电机电流和转矩进行实际测量,以此对估计的参数进行验证。当电机滑差较大时,稳态电流会变成额定电流的几倍,长时间运行会使电机温度上升,致使绕组电阻增大。为此,需要在确保定子电阻保持恒定的情况下进行稳态测量。
根据所估计的模型参数,则可计算出不同滑差下电机的电流和转矩。为了对估计的参数进行验证,本文进行了实际测试。在 1 s = 到 0 s = 范围内,通过转矩传感器和电流传感器测量不同速度下的电机实际转矩和电流,并将其与基于本文方法和文献方法估计的参数所计算出的转矩和电流进行比较。可以观察到,根据本文方法估计的参数所获得的电机转矩和电流基本符合实际测量,证明了本文方法的有效性。其中,双笼模型的估计值和测量值几乎完全一致,比单笼模型更加准确。这说明了本文方法更加适用于双笼式三相感应电机的参数估计。另外,通过与文献方法的比较可以看出,本文方法的参数估计的精确的较高。
5 结 论
本文提出一种基于变频激励响应测试的鼠笼式异步电机参数估计方法。通过向电机两相施加一个变频激励信号来测量电机的频率响应,并以此来估计电机参数。验证实验表明,本文方法能够准确地估计出电机参数,具有一定的应用价值。在今后的工作中,将考虑尝试采用在线频率响应法对电机进行参数估计,并分析与静态频率响应法的性能差异。